

Bei strahlendem Sonnenschein hat das Projekt BikeDetect nun eine erste Datenerhebung im Freien absolviert. Damit später eine stabile Datenaufnahme und -auswertung im Livebetrieb im Straßenverkehr möglich ist, sind zunächst erste Tests außerhalb des Straßenverkehrs erforderlich. Projektmitarbeiter Johannes Wilbers hat in diesem Zusammenhang die Potentiale ausgewählter Sensoren auf dem Werksgelände der iotec GmbH in Osnabrück überprüft. In mehreren Szenarien (u.a. zu Fuß gehen, Fahrradfahren, siehe Abbildung 1 oben oben) wurden erste Daten erhoben. Dabei sind für das Projekt u.a. die Klassifikation der Radfahrenden, die z.B. über die Kamerabilder mit dem Einsatz von KI Modellen erreicht werden kann, als auch die Abstandsmessung, die u.a. per Ultraschall erfasst wird, von Interesse. Die Universität Oldenburg erforscht Ansätze, um diese Datenströme zusammenzuführen, damit Aussagen zu Überholabständen möglich werden.
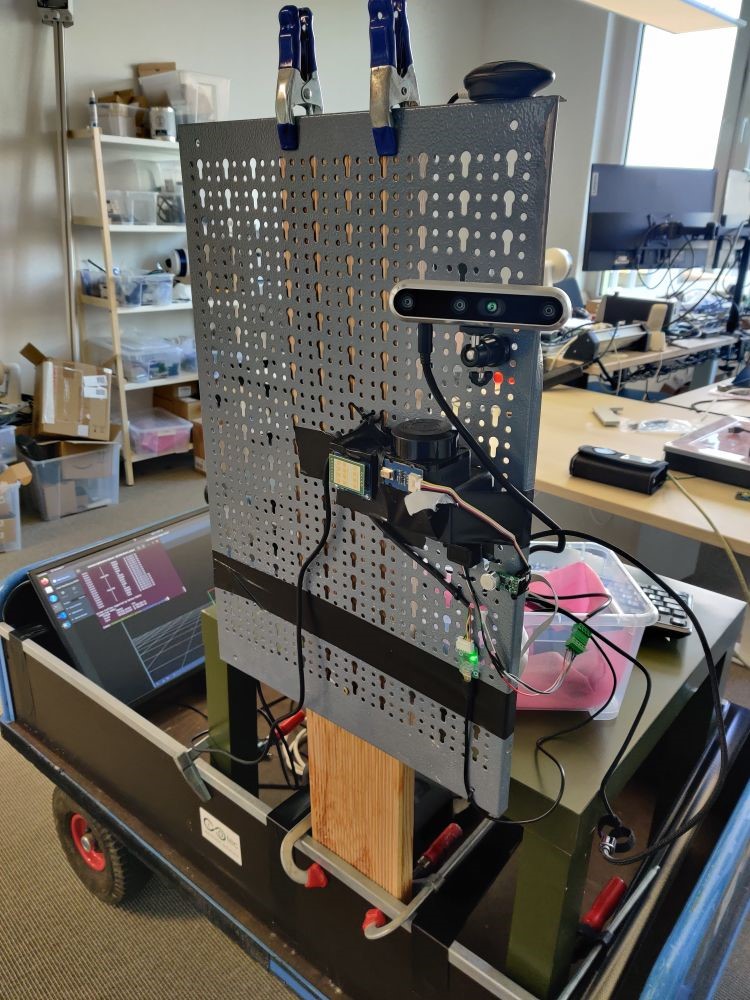
Den detaillierten Aufbau des verwendeten Sensorsystems, das aus mehrerren Komponenten besteht, die im Herbst 2024 im Rahmen des Stakeholderworkshops in Osnabrück diskutiert und genauer definiert wurden, zeigt Abbildung 2. LiDAR und 360° Sensoren detektieren die Umgebung. Mit Radar und Ultraschall können Abstände gemessen werden. Anhand des Thermal-Sensors könnte basierend auf sich verändernden Temperaturen auf lebende Objekte (z.B. Menschen) in der Umgebung geschlossen werden. Alle relevanten Sensoren wurden für den Test auf einem Bollerwagen befestigt, damit der Sensoraufbau bewegbar ist. In einer Teilstudie des kürzlich durchgeführten Tests wurde ein Überholvorgang simuliert, d.h. der Bollerwagen überholte das Fahrrad während der Fahrt.
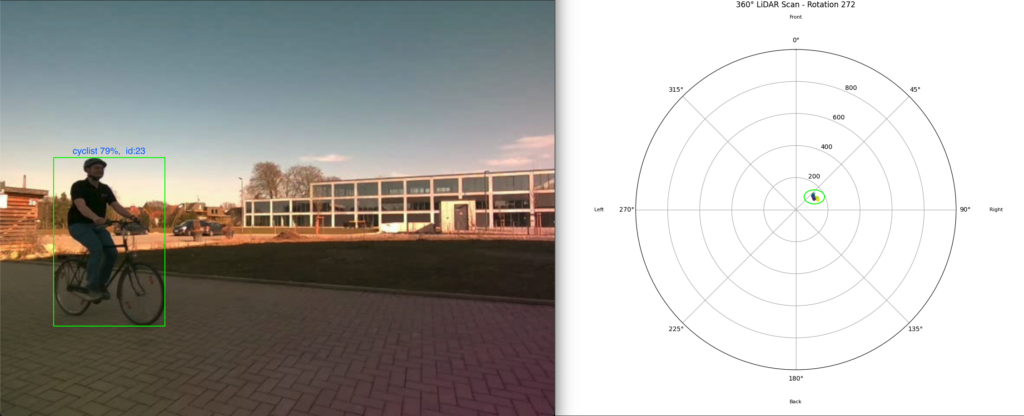
Auf Basis der Kameradaten werden momentan an der Abteilung für Wirtschaftsinfromatik VLBA KI Modelle zur Erkennung von Radfahrenden trainiert. Zusätzlich wurden die Daten zur Abstandmessung ersten Verarbeitungsschitten unterzogen. Exemplarisch zeigt Abbildung 3 die KI basierte Detektion eines Radfahrenden (links) und die dazu zeitlich synchronisierten 360°-LiDAR-Daten aus der BikeDetect-Datenerhebung (rechts). Die Erkennung in den Kameradaten erfolgt anhand eines KI Modells aus dem Bereich Object Detection. Das 360°-LiDAR-Polardiagramm ermöglicht eine räumliche Einordnung der erfassten Objekte in der Umgebung des Sensors. Vom Zentrum des Diagramms ausgehend markieren die kreisförmigen Linien verschiedene Entfernungen (200 cm, 400 cm, 600 cm usw.), wobei der Mittelpunkt die Position des Sensors darstellt. Die Richtungen sind durch die Winkel vorgegeben (90° rechts, 180° hinten, 270° links usw.). Aus der Darstellung rechts lässt sich schließen, dass der Radfahrende auf der rechten Seite des Sensors mit zwei Meter Abstand erfasst wurde, was (in etwa) der Position des Radfahrenden im Kamerabild entsprechen sollte. Wie das Beispiel zeigt, ist anhand der Synchronisierung eine Aussage zum Überholabstand möglich.
Das Projektkonsortium erhofft sich durch die initiale Datenaufnahme inklusive erster Schritte zur Auswertung der Sensordaten wichtige Impulse für weitere Tests in den kommenden Monaten, welche die Grundlage für den Einsatz der BikeDetect Sensoren im realen Straßenverkehr bilden soll. Der offizielle Feldtest im Innenstadtverkehr in Osnabrück ist für den Zeitraum September oder Oktober 2025 geplant. Sobald weitere Tests oder Studien anstehen, informieren wir über die offizielle Webseite.