Im Rahmen seiner Abschlussveranstaltung konnte BikeDetect seine finalen Ergebnisse der Machbarkeitsstudie vorstellen. Ziel war es ein prototypisches Sensorsystem zur Detektion von Radfahrenden und Überholabständen im Straßenverkehr zu entwickeln und dieses in einer realen Straßenumgebung zu testen. Die beteiligten Partner der Universität Oldenburg, der iotec GmbH sowie der Stadt Osnabrück gingen auf die erzielten Ergebnisse detaillierter ein. Das als Online-Event konzipierte Format bot die Gelegenheit, einen direkten Dialog mit interessierten Bürgerinnen und Bürgern sowie Fachexpertinnen und -experten aufzunehmen.
Das konzipierte Sensorsystem berücksichtigt neben Videokameras auch kostengünstige und nicht-kamerabasierte Sensoren, um Alternativen zu bestehenden Systemen zu schaffen. Das interdisziplinäre Team hat innerhalb des Projektes Ultraschall-, Radar- und optische Verfahren hinsichtlich ihres Potenzials für die Abstandsmessung getestet. Zum Erkennen von Personen auf dem Fahrrad setzten sie LiDAR-Systeme, 3D-Kameras und eine Wärmebildkamera ein. Die Stereokamera diente dabei u.a. als Referenz, u.a. um nachzuvollziehen, inwieweit mögliche Detektionen der Radfahrenden durch die anderen Sensoren als korrekt einzustufen sind.
Frau Ulla Bauer, Radverkehrsbeauftragte der Stadt Osnabrück, wies in Ihrem Beitrag auf den Unterschied zwischen Überholen und Vorbeifahren hin, da hier andere Regelungen bei den einzuhaltenden Abständen gelten. Die Stadt hat sich insbesondere bei der Routenwahl der zu befahrenden Strecke im Osnabrücker Stadtgebiet eingebracht. Dabei wurden Kategorien wie die Stärke des Kfz-Verkehrs, oder die maximale Höchstgeschwindigkeit für den motorisierten Verkehr (20-30-50-70 km/h) berücksichtigt. Ziel war es, möglichst viele Strecken mit Begegnungsfällen zwischen Radfahrenden und Autos oder anderen Fahrzeugen zu schaffen.
Auf Basis der Daten aus den anfänglichen Parkplatztests sowie aus den 2-tägigen Messfahren im Straßenverkehr, die Oktober 2025 im Innenstadtverkehr von Osnabrück stattfanden, entwickelte das Entwicklerteam an der Universität Oldenburg mehrere KI-Modelle, um die Radfahrerinnen und Radfahrer in der Nähe eines Fahrzeugs zu identifizieren. „Wir konnten zeigen, dass ein derartiges Assistenzsystem grundsätzlich funktioniert, auch wenn wir in dieser Machbarkeitsstudie nur begrenzte Datenmengen erheben konnten“, erklärt der Projektleiter Johannes Schering von der Universität Oldenburg.

Einige Sensoren haben besonders hohes Potenzial gezeigt. Die Kamera in Verbindung mir dem 360°LiDAR haben für die Erkennung am besten funktioniert. Die KI-Modelle auf Basis von Videodaten erkennen Radfahrende im Straßenverkehr recht zuverlässig. „Fehleranfällig waren die Systeme vor allem, wenn die Radfahrenden in einer Gruppe fuhren oder von Bäumen verdeckt waren, oder wenn die Abstände zwischen Auto und Fahrrad sehr groß oder sehr gering waren“, berichtete Projektleiter Schering. Auch der Radar-Sensor zeigt positive Ergebnisse. Die Erkennung durch Infrarot sowie das GPS, durch das sich auf die Geschwindigkeit schließen lässt, können situationsbedingt einen zusätzlichen Mehrwert schaffen. Anhand der Positionsdaten und der Geschwindigkeit kann ein passendes Expertenmodell situativ ausgewählt werden. Der Ultraschall-Sensor zeigt jedoch Schwächen bei nicht reflektieren Objekten, und wird somit eher nicht Bestandteil eines künftigen Assistenzsystems zur Erhöhung der Verkehrssicherheit von Radfahrenden sein. Während sich per Ultraschall andere Autos erkennen lassen, stellen weiche Objekte wie z.B. ein Mensch eine Herausforderung für den Ultraschall-Sensor dar.
In der abschließenden Fragerunde wurden mehrere Fachfragen gestellt. False Positives stellen für die KI-Modelle eher kein Problem dar. Dies bedeutet, dass sobald Radfahrende erkannt werden, diese Vorhersagen meist auch korrekt sind (Precision bei 92%). Allerdings muss erwähnt werden, dass Radfahrende tendenziell häufiger durch das Modell übersehen werden können. Grundsätzlich können kamerabasierte KI-Modelle, die auf Videodaten aus anderen Ländern (z.B. VR China) trainiert wurden, nicht immer problemlos auf neue Daten in anderem Kontext z.B. aus Osnabrück angewendet werden. Hierbei müssen auch unbedingt verschiedene Umweltbedingungen oder Verkehrssituationen berücksichtigt werden, was in der 2-tägigen Teststudie im Herbst nur schwerlich umsetzbar war. Die Messdaten sollten daher perspektivisch über einen längeren Zeitraum, etwa 6 Monate, kontinuierlich erhoben werden, um unterschiedliche Testszenarien und unterschiedliche Bedingungen abzudecken. Dies wird die Qualität der Ergebnisse voraussichtlich weiter steigern. Einsatz- und Geschäftspotenzial des konzipierten Sensorsystems sieht das Projektteam in den Bereichen Autonomes Fahren, Flottenbetreiber, oder Fahrschulen im Fahrsicherheitstraining.
Langfristig könnte auf Basis der Erkenntnisse ein smarter Fahrassistent für den motorisierten Verkehr entwickelt werden, die die Einhaltung von Abständen im Straßenverkehr unterstützt. Basierend auf der korrekten Erkennung und der KI-Modelle, die in Echtzeit im Fahrzeug implementiert werden, informiert das Auto und regt zu verkehrssicherem und -gerechten Fahrverhalten an: „Wenn du deine jetzige Geschwindigkeit beibehältst, kannst du in 50 m nicht überholen“ oder „dieser Abstand war unter dem minimal einzuhaltenden Abstand“ könnte mögliches Feedback des Assistenzsystems lauten. Ebenso könnte das Messsystem dabei weitere Kontextinformationen erfassen, die in die weitere Verbesserung der Infrastruktur einfließen könnten, bspw. welche Art der Radverkehrsinfrastruktur befahren wurde.
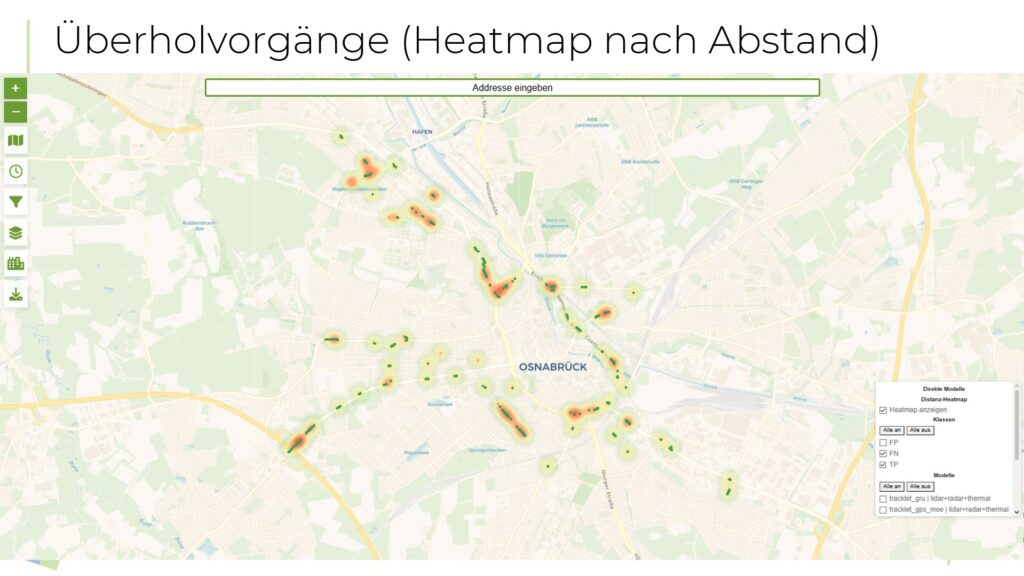
Da das BikeDetect Sensorsystem nur an zwei Tagen im Straßenverkehr getestet wurde, kann das Projekt keine generellen Aussagen zu Überholabständen im Osnabrücker Straßenverkehr treffen. Johannes Wilbers, der das Fahrzeug gesteuert hat, hat versucht die Abstände korrekt einzuhalten. Bei der Befahrung wurden aber die Verkehrsbelastung und Verkehrsspitzen an den Werktagen berücksichtigt, um ein möglichst realistisches Szenario zu schaffen. Es ist davon auszugehen, dass sich viele Autofahrer nicht ordnungsgemäß beim Überholen und Vorbeifahren verhalten. Dies gilt es in weiteren Anschlussprojekten zu untersuchen. Die Datenerhebungsmethodik sowie Auswertung, die in BikeDetect entwickelt wurden, bieten dafür eine fundierte Grundlage.
BikeDetect wurde vom Bundesministerium für Verkehr (BMV) in der Innovationsinitiative mFUND gefördert. Das Programm besteht seit 2016 und fördert Forschungs- und Entwicklungsprojekte rund um datenbasierte digitale Innovationen für die Mobilität der Zukunft. Die Projektförderung wird ergänzt durch eine aktive fachliche Vernetzung zwischen Akteuren aus Politik, Wirtschaft, Verwaltung und Forschung und die Bereitstellung offener Daten.
Die offizielle Pressemitteilung zum Projektende von der Universität Oldenburg ist hier zu finden: